

Researchers from the Institute of Networked and Embedded Systems at the University of Klagenfurt have published results on different aspects of vision-based surveillance systems.
Together with Queen Mary University of London we have proposed a novel framework for determining time instants when a video tracker fails. Video tracking is a fundamental task for surveillance systems, and detecting when a tracker looses its assigned object, is important for improving the robustness of a surveillance system. Our approach first determines the tracking quality by comparing the distributions of the tracker state and the region around its state. We then model the tracking quality score as time series and employ and ARMA model to forecast future values.
-
Obaid Khalid, Bernhard Rinner and Andrea Cavallaro.
Detecting tracking errors via forecasting.
In Proc. British Machine Vision Conference (BMVC), York, UK. September 2016.

Multiple unmanned aerial vehicles (UAVs) are increasingly applied for surveillance tasks such as disaster management and environmental monitoring. Due to limited battery capacity and bounded wireless communication, small-scale UAVs pose fundamental challenges for achieving persistence. Jürgen Scherer and Bernhard Rinner tackle this problem and propose an offline path planning algorithm that ensures that the UAVs can always reach the base station to replace their batteries and that each UAV is always connected with the base station via a single or multi-hop link. In a simulation study, a single base station scenario is compared with several extensions for multiple base stations based on the maximum time a sensing location has not been visited.
-
Jürgen Scherer and Bernhard Rinner.
Persistent Multi-UAV Surveillance with Energy and Communication Constraints.
In Proc. IEEE International Conference on Automation Science and Engineering (CASE), Dallas, TX, USA. August 2016.
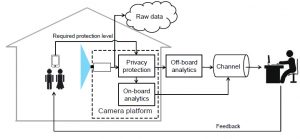
Surveillance and monitoring tasks are performed in various everyday scenarios, where security and privacy-protection is an important concern. Researchers of NES and the University of Reading have developed a concept for trustful and user-centric monitoring for a health-care use case. This new approach that involves sensor edge computing to enable sensor-level security and privacy protection and allows observed individuals to interact and control their data without impacting on the quality of the data for further processing.
-
Tahir Nawaz, Bernhard Rinner and James Ferryman.
User-centric, embedded vision-based human monitoring: A concept and a healthcare use case.
In Proc. ACM/IEEE International Conference on Distributed Smart Cameras (ICDSC), Paris, France. September 2016.

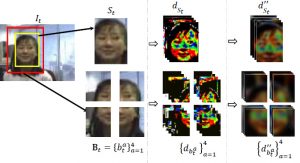
Airborne cameras on low-flying unmanned vehicles introduce new privacy challenges due to their mobility and viewing angles. Omair Sarwar, Bernhard Rinner and Andrea Cavallaro focus on face recognition from airborne cameras and explore the design space to determine when a face in an airborne image is inherently protected, that is when an individual is not recognizable. Moreover, when individuals are recognizable by facial recognition algorithms, we propose an adaptive filtering mechanism to lower the face resolution in order to preserve privacy while ensuring a minimum reduction of the fidelity of the image.
-
Omair Khan, Bernhard Rinner and Andrea Cavallaro.
Design Space Exploration for Adaptive Privacy Protection in Airborne Images.
In Proc. IEEE International Conference on Advanced Video and Signal-based Surveillance (AVSS), Colorado Springs, CO, USA. August 2016.



