
Autonomous systems are able to make decisions and potentially take actions without direct human intervention, which requires some knowledge about the system and its environment as well as goal-oriented reasoning. Autonomous systems will undoubtedly pervade into our everyday lives, and we will find them in a variety of domains and applications including robotics, transportation, health care, communications, and entertainment to name a few.
The Proceedings of the IEEE features a special issue – co-edited by Nikil Dutt, Carlo Regazzoni, Bernhard Rinner and Xin Yao – that covers concepts and fundamentals, architectures and techniques, and applications and case studies in the exciting area of self-awareness in autonomous systems.
Self-awareness is a broad concept borrowed from cognitive science and psychology that describes the property of a system, which has knowledge of “itself,” based on its own senses and internal models. This knowledge may take different forms, is based on perceptions of both internal and external phenomena, and is essential for being able to anticipate and adapt to unknown situations. Computational self-awareness methods comprise a new promising field that enables an autonomous agent to detect nonstationary conditions, to learn internal models of its environment, and to autonomously adapt its behavior and structure to the contextual tasks. Roughly speaking, a self-aware autonomous system has the following key capabilities: 1) create and learn models from sensor inputs; 2) infer its state and the environment’s state based on the models; 3) detect discrepancies between observed and inferred behavior; and 4) explore tradeoffs and act in accordance with high-level goals. Although the level and complexity of these capabilities may vary, they serve as the basis towards achieving truly autonomous behaviors.
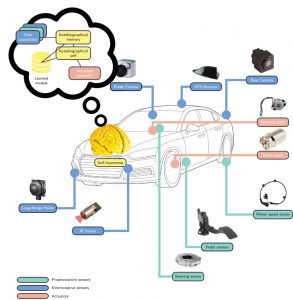 An example of a physical architecture for a self-aware autonomous system is depicted in this figure. The self-aware agent (here conceptually embedded in a vehicle) observes its surrounding environment with exteroceptive sensors (blue) and its internal state withproprioceptive sensors (green) and translates its autonomous decisions into actions through the actuators (in red). The self-aware core (yellow) is established based on internal representations, together with a set of already learned models. It is able to forecast the next state of the environment and the systemitself, detects anomalies and executes the derived actions.
An example of a physical architecture for a self-aware autonomous system is depicted in this figure. The self-aware agent (here conceptually embedded in a vehicle) observes its surrounding environment with exteroceptive sensors (blue) and its internal state withproprioceptive sensors (green) and translates its autonomous decisions into actions through the actuators (in red). The self-aware core (yellow) is established based on internal representations, together with a set of already learned models. It is able to forecast the next state of the environment and the systemitself, detects anomalies and executes the derived actions.
Note: Parts of this post have been taken from papers of the special issue (see below).
Selected Publications
N. Dutt, C.S. Regazzoni, B. Rinner and X. Yao. Self-Awareness for Autonomous Systems (scanning the issue). Proceedings of the IEEE. 108(7):971-975, 2020.
C. Regazzoni, L. Marcenaro, D. Campo and B. Rinner. Multi-sensorial generative and descriptive self-awareness models for autonomous systems. Proceedings of the IEEE. 108(7):987-1010, 2020.
Peter Lewis, Marco Platzner, Bernhard Rinner, Jim Toressen and Xin Yao (Editors). Self-aware Computing Systems – An Engineering Approach. 324 pp, Springer 2016



